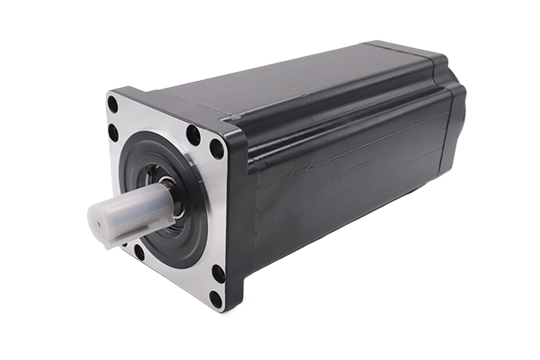
一个常见的误区就是把系统的精度误差全部归结为电机的问题。从步进电机的角度来说,需要满足一些公差标准,包括机械公差和电气公差。相绕组电感的不均衡是重要因素,其他一些原因包括极靴、转子的不对准,定转子间气隙的不均匀,定转子齿槽关系,以及转矩脉动等。达到并持续控制这些参数并不是非常困难的事。我们知道,电机定子绕组的电感量正比于绕组匝数的平方,只要采用恰当的绕制工艺就能保证相电感间的一致性。很多步进电机制造商已经使用自动绕线设备来保证这种一致性。当然,转子磁性材料也应具备良好的一致性从而保证电机各相电感的一致。其他一些规格指标则与机械有关。只要制造商使用可靠的、高品质的部件及优良的工艺控制来保证定转子均匀的磨削量,就能获得满意的精度。上海昀研自动化生产的步进电机保证了两相双极性步进电机相电感间的误差在±5%以内,因此0.9度的步进电机在使用64微步驱动模式下,定位误差可以达到±1.5弧分,包括精确性和准确性。满足了以上条件,步进电机就可以完全达到指标要求。剩下的任务就是让驱动器/控制器告诉步进电机应该运动到哪儿和如何运动,而且不能由于驱动器自身精度不高而降低了电机的精度。一个细分驱动器通过给电机绕组提供特定的激磁电流,告诉电机需要运行多少个微步。步进电机运行在整步模式时,精度最高,因为刚好与电机的机械设计特点相吻合。此时定转子齿正好完全对齐,且绕组中流过的电流最大。随着细分数的增加,步矩角相应减小,此时越来越难以保证定位的准确了。每台步进电机都有自己特定的性能指标,很多指标都是根据实际应用要求设计的。为低速使用设计的电机往往电感量比较大,反之为高速设计电机的电感量比较小。为了满足不同的运动规律,上海昀研的步进电机设计工程师需要调整线圈中绕组的设计,以满足和速度、转矩、电流、电阻以及电感相关的数学公式。也因此,同一台驱动器匹配不同电机时呈现出不同的运行性能,同样,一台电机匹配不同的驱动器时转矩特性也不同。
上海四宏电机有限公司主营产品:步进电机、无刷电机、伺服电机、步进电机驱动器、刹车电机、直线电机等各类型号的步进电机,欢迎来电咨询。电话:021-59751541